Task Management
- Former user (Deleted)
- WES Admin
- Former user (Deleted)
In the previous section, I specified that a task is either an infinite loop function or a function that deletes itself when it is done executing. Note that the task code is not actually deleted — µC/OS-II simply doesn’t know about the task anymore, so that code will not run. A task looks just like any other C function, containing a return type and an argument, but it must never return. The return type of a task must always be declared void. The functions described in this chapter are found in the file OS_TASK.C. To review, a task must have one of the two structures:
void YourTask (void *pdata)
{
for (;;) {
/* USER CODE */
Call one of uC/OS-II's services:
OSFlagPend();
OSMboxPend();
OSMutexPend();
OSQPend();
OSSemPend();
OSTaskSuspend(OS_PRIO_SELF);
OSTimeDly();
OSTimeDlyHMSM();
/* USER CODE */
}
}
or,
void YourTask (void *pdata)
{
/* USER CODE */
OSTaskDel(OS_PRIO_SELF);
}
This chapter describes the services that allow your application to create a task, delete a task, change a task’s priority, suspend and resume a task, and allow your application to obtain information about a task.
µC/OS-II can manage up to 64 tasks, although µC/OS-II reserves the four highest priority tasks and the four lowest priority tasks for its own use. However, at this time, only two priority levels are actually used by µC/OS-II: OSTaskCreate and OS_LOWEST_PRIO-1 (see OS_CFG.H). This leaves you with up to 56 application tasks. The lower the value of the priority, the higher the priority of the task. In the current version of µC/OS-II, the task priority number also serves as the task identifier.
Creating a Task, OSTaskCreate()
In order for µC/OS-II to manage your task, you must create it. You create a task by passing its address and other arguments to one of two functions: OSTaskCreate() or OSTaskCreateExt(). OSTaskCreate() is backward compatible with µC/OS, and OSTaskCreateExt() is an extended version of OSTaskCreate(), providing additional features. A task can be created using either function. A task can be created prior to the start of multitasking or by another task. You must create at least one task before you start multitasking [i.e., before you call OSStart()]. A task cannot be created by an ISR.
The code for OSTaskCreate() is shown in Listing 4.1. As can be seen, OSTaskCreate() requires four arguments. task is a pointer to the task code, pdata is a pointer to an argument that is passed to your task when it starts executing, ptos is a pointer to the top of the stack that is assigned to the task (see section 4.02, Task Stacks), and prio is the desired task priority.
INT8U OSTaskCreate (void (*task)(void *pd), void *pdata, OS_STK *ptos, INT8U prio)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
void *psp;
INT8U err;
#if OS_ARG_CHK_EN > 0u
if (prio > OS_LOWEST_PRIO) { (1)
return (OS_ERR_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
if (OSIntNesting > 0u) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_CREATE_ISR);
}
if (OSTCBPrioTbl[prio] == (OS_TCB *)0) { (2)
OSTCBPrioTbl[prio] = (OS_TCB *)OS_TCB_RESERVED; (3)
OS_EXIT_CRITICAL(); (4)
psp = (void *)OSTaskStkInit(task, pdata, ptos, 0); (5)
err = OS_TCBInit(prio, psp, (void *)0, 0, 0, (void *)0, 0); (6)
if (err == OS_ERR_NONE) { (7)
if (OSRunning == OS_TRUE) { (8)
OS_Sched(); (9)
}
} else {
OS_ENTER_CRITICAL();
OSTCBPrioTbl[prio] = (OS_TCB *)0; (10)
OS_EXIT_CRITICAL();
}
return (err);
}
OS_EXIT_CRITICAL();
return (OS_ERR_PRIO_EXIST);
}
(1) If the configuration constant OS_ARG_CHK_EN (see file OS_CFG.H) is set to 1, OSTaskCreate() checks that the task priority is valid. The priority of a task must be a number between 0 and OS_LOWEST_PRIO, inclusive. Please note that, OS_LOWEST_PRIO is reserved by µC/OS-II’s idle task. Don’t worry, your application will not be able to call OSTaskCreate() and create a task at priority OS_LOWEST_PRIO because it would have already been ‘reserved’ for the idle task by OSInit(). In this case, OSTaskCreate() would return OS_PRIO_EXIST.
(2) Next, OSTaskCreate() makes sure that a task has not already been created at the desired priority. With µC/OS-II, all tasks must have a unique priority.
(3) If the desired priority is free, µC/OS-II reserves the priority by placing a non-NULL pointer in OSTCBPrioTbl[].
(4) This allows OSTaskCreate() to re-enable interrupts while it sets up the rest of the data structures for the task because no other concurrent calls to OSTaskCreate() can now use this priority.
(5) OSTaskCreate() then calls OSTaskStkInit(), which is responsible for setting up the task stack. This function is processor specific and is found in OS_CPU_C.C. Refer to Chapter 13, Porting µC/OS-II, for details on how to implement OSTaskStkInit(). If you already have a port of µC/OS-II for the processor you are intending to use, you don’t need to be concerned about implementation details. OSTaskStkInit() returns the new top-of-stack (psp), which will be saved in the task’s OS_TCB. You should note that the fourth argument (opt) to OSTaskStkInit() is set to 0. This is because, unlike OSTaskCreateExt(), OSTaskCreate() does not support options, so there are no options to pass to OSTaskStkInit(). µC/OS-II supports processors that have stacks that grow either from high to low memory or from low to high memory. When you call OSTaskCreate(), you must know how the stack grows (see OS_STACK_GROWTH in OS_CPU.H of the processor you are using) because you must pass the task’s top-of-stack to OSTaskCreate(), which can be either the lowest or the highest memory location of the stack.
(6) Once OSTaskStkInit() has completed setting up the stack, OSTaskCreate() calls OS_TCBInit() to obtain and initialize an OS_TCB from the pool of free OS_TCBs. The code for OS_TCBInit() was described in Section 3.?? and is found in OS_CORE.C instead of OS_TASK.C.
(7) If the stack frame and the task's TCB are properly initialized ...
(8) ... if multitasking has already started then ...
(9) The scheduler is called to determine whether the newly created task has a higher priority than the task that called OSTaskCreate(). Creating a higher priority task results in a context switch to the new task. If the task was created before multitasking has started [i.e., you did not call OSStart() yet], the scheduler is not called.
(10) If OS_TCBInit() failed, the priority level is relinquished by setting the entry in OSTCBPrioTbl[prio] to 0.
Creating a Task, OSTaskCreateExt()
Creating a task using OSTaskCreateExt() offers more flexibility, but at the expense of additional overhead. The code for OSTaskCreateExt() is shown in Listing 4.2.
As can be seen, OSTaskCreateExt() requires nine arguments! The first four arguments (task, pdata, ptos, and prio) are exactly the same as in OSTaskCreate(), and they are located in the same order. I did this to make it easier to migrate your code to use OSTaskCreateExt().
id | establishes a unique identifier for the task being created. This argument has been added for future expansion and is otherwise unused by µC/OS-II. This identifier will allow me to extend µC/OS-II beyond its limit of 64 tasks. For now, simply set the task’s ID to the same value as the task’s priority. |
pbos | is a pointer to the task’s bottom-of-stack and this argument is used to perform stack checking. |
stk_size | specifies the size of the stack in number of elements. This means that if a stack entry is four bytes wide, then a stk_size of 1000 means that the stack will have 4,000 bytes. Again, this argument is used for stack checking. |
pext | is a pointer to a user-supplied data area that can be used to extend the |
opt | specifies options to |
INT8U OSTaskCreateExt (void (*task)(void *pd),
void *pdata,
OS_STK *ptos,
INT8U prio,
INT16U id,
OS_STK *pbos,
INT32U stk_size,
void *pext,
INT16U opt)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
OS_STK *psp;
INT8U err;
#if OS_ARG_CHK_EN > 0
if (prio > OS_LOWEST_PRIO) { (1)
return (OS_ERR_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
if (OSIntNesting > 0u) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_CREATE_ISR);
}
if (OSTCBPrioTbl[prio] == (OS_TCB *)0) { (2)
OSTCBPrioTbl[prio] = (OS_TCB *)OS_TCB_RESERVED; (3)
OS_EXIT_CRITICAL(); (4)
psp = (OS_STK *)OSTaskStkInit(task, pdata, ptos, opt); (5)
err = OS_TCBInit(prio, psp, pbos, id, stk_size, pext, opt); (6)
if (err == OS_ERR_NONE) { (7)
if (OSRunning == TRUE) { (8)
OS_Sched(); (9)
}
} else {
OS_ENTER_CRITICAL();
OSTCBPrioTbl[prio] = (OS_TCB *)0; (10)
OS_EXIT_CRITICAL();
}
return (err);
}
OS_EXIT_CRITICAL();
return (OS_ERR_PRIO_EXIST);
}
(1) OSTaskCreateExt() starts by checking that the task priority is valid. The priority of a task must be a number between 0 and OS_LOWEST_PRIO, inclusive. Please note again that, OS_LOWEST_PRIO is reserved by µC/OS-II’s idle task. Your application will not be able to call OSTaskCreateExt() and create a task at priority OS_LOWEST_PRIO because it would have already been ‘reserved’ for the idle task by OSInit(). In this case, OSTaskCreateExt() would return OS_PRIO_EXIST.
(2) Next, OSTaskCreateExt() makes sure that a task has not already been created at the desired priority. With µC/OS-II, all tasks must have a unique priority.
(3) If the desired priority is free, then µC/OS-II reserves the priority by placing a non-NULL pointer in OSTCBPrioTbl[].
(4) This allows OSTaskCreateExt() to re-enable interrupts while it sets up the rest of the data structures for the task.
(5) OSTaskCreateExt() then calls OSTaskStkInit(), which is responsible for setting up the task stack. This function is processor specific and is found in OS_CPU_C.C. Refer to Chapter 13, Porting µC/OS-II, for details on how to implement OSTaskStkInit(). If you already have a port of µC/OS-II for the processor you are intending to use, then you don’t need to be concerned about implementation details. OSTaskStkInit() returns the new top-of-stack (psp) which will be saved in the task’s OS_TCB. µC/OS-II supports processors that have stacks that grow either from high to low memory or from low to high memory (see section 4.02, Task Stacks). When you call OSTaskCreateExt(), you must know how the stack grows (see OS_CPU.H of the processor you are using) because you must pass the task’s top-of-stack, which can either be the lowest memory location of the stack (when OS_STK_GROWTH is 0) or the highest memory location of the stack (when OS_STK_GROWTH is 1), to OSTaskCreateExt().
(6) Once OSTaskStkInit() has completed setting up the stack, OSTaskCreateExt() calls OS_TCBInit() to obtain and initialize an OS_TCB from the pool of free OS_TCBs. The code for OS_TCBInit() is described in section section 3.03, Task Control Blocks.
(10) If OS_TCBInit() failed, the priority level is relinquished by setting the entry in OSTCBPrioTbl[prio] to 0.
(7) & (8) & (9) Finally, if OSTaskCreateExt() is called once multitasking has started (i.e., OSRunning is set to TRUE), the scheduler is called to determine whether the created task has a higher priority than its creator. Creating a higher priority task results in a context switch to the new task. If the task was created before multitasking started [i.e., you did not call OSStart() yet], the scheduler is not called.
Task Stacks
Each task must have its own stack space. A stack must be declared as being of type OS_STK and must consist of contiguous memory locations. You can allocate stack space either statically (at compile time) or dynamically (at run time). A static stack declaration is shown in Listings 4.3 and 4.4. Either declaration is made outside a function
static OS_STK MyTaskStack[stack_size];
or
OS_STK MyTaskStack[stack_size];
You can allocate stack space dynamically by using the C compiler’s malloc() function as shown in Listing 4.5. However, you must be careful with fragmentation. Specifically, if you create and delete tasks, your memory allocator may not be able to return a stack for your task(s) because the heap eventually becomes fragmented.
OS_STK *pstk;
pstk = (OS_STK *)malloc(stack_size);
if (pstk != (OS_STK *)0) { /* Make sure malloc() has enough space */
Create the task;
}
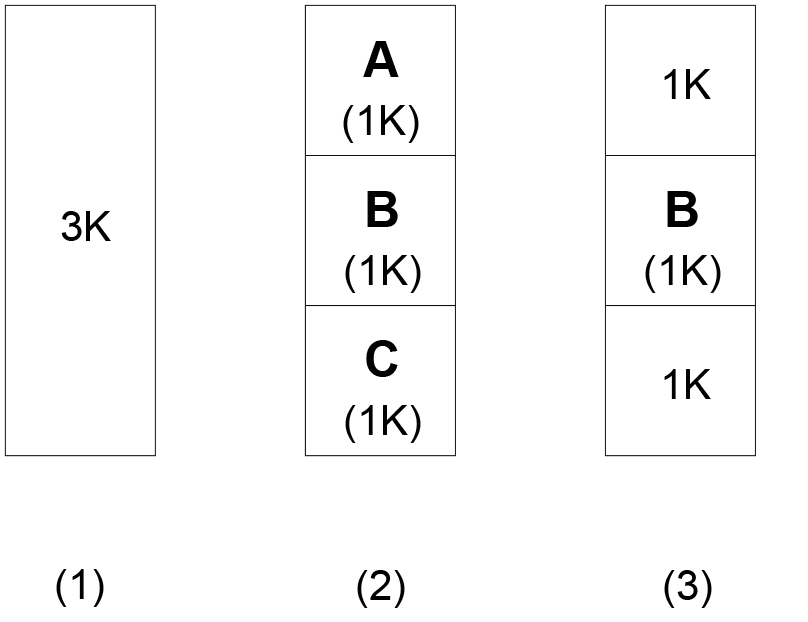
(1) Figure 4.1 illustrates a heap containing 3Kb of available memory that can be allocated with malloc(). For the sake of discussion, you create three tasks (tasks A, B, and C), each requiring 1Kb.
(2) Assume that the first 1Kb is given to task A, the second to task B, and the third to task C.
(3) Your application then deletes task A and task C and relinquishes the memory to the heap using free(). Your heap now has 2Kb of memory free, but it’s not contiguous. This means that you cannot create another task (i.e., task D) that requires 2 Kb because your heap is fragmented. If, however, you never delete a task, the use of malloc() is perfectly acceptable.
Because µC/OS-II supports processors with stacks that grow either from high to low memory or from low to high memory, you must know how the stack grows when you call either OSTaskCreate() or OSTaskCreateExt() because you need to pass the task’s top-of-stack to these functions. When OS_STK_GROWTH is set to 0 in OS_CPU.H , you need to pass the lowest memory location of the stack to the task create function as shown in Listing 4.6.
OS_STK TaskStk[TASK_STK_SIZE]; OSTaskCreate(task, pdata, &TaskStk[0], prio);
When OS_STK_GROWTH is set to 1 in OS_CPU.H, you need to pass the highest memory location of the stack to the task create function as shown in Listing 4.7.
OS_STK TaskStk[TASK_STK_SIZE]; OSTaskCreate(task, pdata, &TaskStk[TASK_STK_SIZE-1], prio);
This requirement affects code portability. If you need to port your code from a processor architecture that supports a downward-growing stack to one that supports an upward-growing stack, you may need to make your code handle both cases. Specifically, Listings 4.6 and 4.7 are rewritten as shown in Listing 4.8.
OS_STK TaskStk[TASK_STK_SIZE];
#if OS_STK_GROWTH == 0
OSTaskCreate(task, pdata, &TaskStk[0], prio);
#else
OSTaskCreate(task, pdata, &TaskStk[TASK_STK_SIZE-1], prio);
#endif
The size of the stack needed by your task is application specific. When sizing the stack, however, you must account for nesting of all the functions called by your task, the number of local variables that will be allocated by all functions called by your task, and the stack requirements for all nested interrupt service routines. In addition, your stack must be able to store all CPU registers.
Stack Checking, OSTaskStkChk()
Sometimes it is necessary to determine how much stack space a task actually uses. This allows you to reduce the amount of RAM needed by your application code by not overallocating stack space. µC/OS-II provides OSTaskStkChk(), which provides you with this valuable information.
In order to use the µC/OS-II stack-checking facilities, you must do the following.
- Set
OS_TASK_CREATE_EXTto 1 inOS_CFG.H. - Create a task using
OSTaskCreateExt()and give the task much more space than you think it really needs. You can callOSTaskStkChk()for any task, from any task. - Set the opt argument in
OSTaskCreateExt()toOS_TASK_OPT_STK_CLR + OS_TASK_OPT_STK_CLR. Note that if your startup code clears all RAM and you never delete tasks once they are created, you don’t need to set theOS_TASK_OPT_STK_CLRoption. This reduces the execution time ofOSTaskCreateExt(). - Call
OSTaskStkChk()from a task by specifying the priority of the task you want to check. You can inquire about any task stack not just the running task.
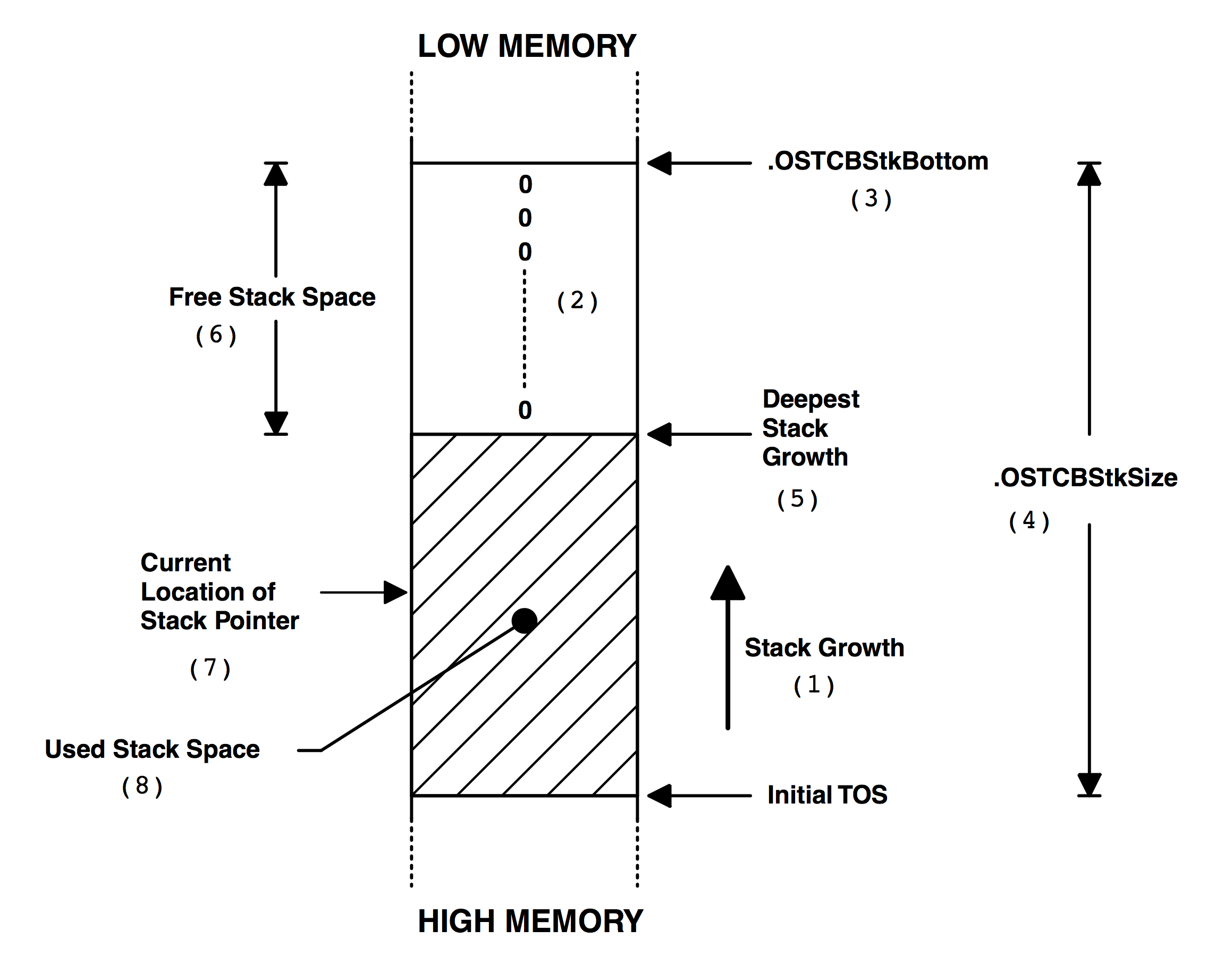
(1) In Figure 4.2, I assume that the stack grows from high memory to low memory (i.e., OS_STK_GROWTH is set to 1) but the following discussion applies equally well to a stack growing in the opposite direction. µC/OS-II determines stack growth by looking at the contents of the stack itself. Stack checking is performed on demand as opposed to continuously.
(2) To perform stack checking, µC/OS-II requires that the stack be filled with zeros when the task is created.
(3) & (4) Also, µC/OS-II needs to know the location of the bottom-of-stack (BOS) and the size of the stack you assigned to the task. These two values are stored in the task’s OS_TCB when the task is created, but only if created with OSTaskCreateExt() .
(5) OSTaskStkChk() computes the amount of free stack space by “walking” from the bottom of the stack and counting the number of zero-value entries on the stack until a nonzero value is found. Note that stack entries are checked using the data type of the stack (see OS_STK in OS_CPU.H). In other words, if a stack entry is 32 bits wide, the comparison for a zero value is done using 32 bits.
(6) & (8) The amount of stack space used is obtained by subtracting the number of zero-value entries from the stack size you specified in OSTaskCreateExt() . OSTaskStkChk() actually places the number of bytes free and the number of bytes used in a data structure of type OS_STK_DATA (see uCOS_II.H ).
(7) Note that at any given time, the stack pointer for the task being checked may be pointing somewhere between the initial top-of-stack (TOS) and the deepest stack growth.
(5) Also, every time you call OSTaskStkChk(), you may get a different value for the amount of free space on the stack until your task has reached its deepest growth.
You need to run the application long enough and under your worst case conditions to get proper numbers. Once OSTaskStkChk() provides you with the worst case stack requirement, you can go back and set the final size of your stack. You should accommodate system expansion, so make sure you allocate between 10 and 100 percent more stack than what OSTaskStkChk() reports. What you should get from stack checking is a ballpark figure; you are not looking for an exact stack usage.
The code for OSTaskStkChk() is shown in Listing 4.9. The data structure OS_STK_DATA (see uCOS_II.H) is used to hold information about the task stack. I decided to use a data structure for two reasons. First, I consider OSTaskStkChk() to be a query-type function, and I wanted to have all query functions work the same way — return data about the query in a data structure. Second, passing data in a data structure is efficient and allows me to add additional fields in the future without changing the API (Application Programming Interface) of OSTaskStkChk(). For now, OS_STK_DATA only contains two fields: OSFree and OSUsed. As you can see, you invoke OSTaskStkChk() by specifying the priority of the task you want to perform stack checking on.
INT8U OSTaskStkChk (INT8U prio, OS_STK_DATA *pdata)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
OS_TCB *ptcb;
OS_STK *pchk;
INT32U free;
INT32U size;
#if OS_ARG_CHK_EN > 0u
if (prio > OS_LOWEST_PRIO) { (1)
if (prio != OS_PRIO_SELF) {
return (OS_ERR_PRIO_INVALID);
}
}
if (p_stk_data == (OS_STK_DATA *)0) {
return (OS_ERR_PDATA_NULL);
}
#endif
pdata->OSFree = 0u;
pdata->OSUsed = 0u;
OS_ENTER_CRITICAL();
if (prio == OS_PRIO_SELF) { (2)
prio = OSTCBCur->OSTCBPrio;
}
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { (3)
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_EXIST);
}
if (ptcb == OS_TCB_RESERVED) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_EXIST);
}
if ((ptcb->OSTCBOpt & OS_TASK_OPT_STK_CHK) == 0u) { (4)
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_OPT);
}
free = 0u; (5)
size = ptcb->OSTCBStkSize;
pchk = ptcb->OSTCBStkBottom;
OS_EXIT_CRITICAL();
#if OS_STK_GROWTH == 1u
while (*pchk++ == (OS_STK)0) {
free++;
}
#else
while (*pchk-- == (OS_STK)0) {
free++;
}
#endif
pdata->OSFree = free * sizeof(OS_STK); (6)
pdata->OSUsed = (size - free) * sizeof(OS_STK);
return (OS_ERR_NONE);
}
(1) If OS_ARG_CHK_EN is set to 1 in OS_CFG.H, OSTaskStkChk() verifies that the priority is within valid range.
(2) If you specify OS_PRIO_SELF, it is assumed that you want to know the stack information about the current task.
(3) Obviously, the task must exist. Simply checking for the presence of a non-NULL pointer in OSTCBPrioTbl[] ensures this.
(4) To perform stack checking, you must have created the task using OSTaskCreateExt() and you must have passed the option OS_TASK_OPT_STK_CHK. If you would called OSTaskStkChk() from a task that was created by OSTaskCreate() (instead of OSTaskCreateExt()) then the opt argument (passed to OS_TCBInit()) would have been 0 and the test would fail.
(5) If all the proper conditions are met, OSTaskStkChk() computes the free stack space as described above by walking from the bottom of stack until a nonzero stack entry is encountered.
(6) Finally, the information that is stored in OS_STK_DATA is computed. Note that the function computes the actual number of bytes free and the number of bytes used on the stack as opposed to the number of elements. Obviously, the actual stack size (in bytes) can be obtained by adding these two values.
Deleting a Task, OSTaskDel()
Sometimes it is necessary to delete a task. Deleting a task means that the task will be returned to the DORMANT state (see section 3.02, Task States) and does not mean that the code for the task will be deleted. The task code is simply no longer scheduled by µC/OS-II. You delete a task by calling OSTaskDel() (Listing 4.10).
INT8U OSTaskDel (INT8U prio)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
#if OS_EVENT_EN > 0
OS_EVENT *pevent;
#endif
#if (OS_FLAG_EN > 0u) && (OS_MAX_FLAGS > 0u)
OS_FLAG_NODE *pnode;
#endif
OS_TCB *ptcb;
if (OSIntNesting > 0) { (1)
return (OS_ERR_TASK_DEL_ISR);
}
if (prio == OS_TASK_IDLE_PRIO) { (2)
return (OS_ERR_TASK_DEL_IDLE);
}
#if OS_ARG_CHK_EN > 0
if (prio >= OS_LOWEST_PRIO && prio != OS_PRIO_SELF) { (3)
return (OS_ERR_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
if (prio == OS_PRIO_SELF) { (4)
prio = OSTCBCur->OSTCBPrio;
}
ptcb = OSTCBPrioTbl[prio];
if (ptcb != (OS_TCB *)0) { (5)
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_EXIST);
}
if (ptcb == OS_TCB_RESERVED) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_DEL);
}
OSRdyTbl[ptcb->OSTCBY] &= (OS_PRIO)~ptcb->OSTCBBitX; (6)
if (OSRdyTbl[ptcb->OSTCBY] == 0u) {
OSRdyGrp &= (OS_PRIO)~ptcb->OSTCBBitY;
}
#if (OS_EVENT_EN)
if (ptcb->OSTCBEventPtr != (OS_EVENT *)0) { (7)
OS_EventTaskRemove(ptcb, ptcb->OSTCBEventPtr); /
}
#if (OS_EVENT_MULTI_EN > 0u)
if (ptcb->OSTCBEventMultiPtr != (OS_EVENT **)0) {
OS_EventTaskRemoveMulti(ptcb, ptcb->OSTCBEventMultiPtr);
}
#endif
#endif
#if (OS_FLAG_EN > 0u) && (OS_MAX_FLAGS > 0u)
pnode = ptcb->OSTCBFlagNode; (8)
if (pnode != (OS_FLAG_NODE *)0) {
OS_FlagUnlink(pnode);
}
#endif
ptcb->OSTCBDly = 0u; (9)
ptcb->OSTCBStat = OS_STAT_RDY; (10)
ptcb->OSTCBStatPend = OS_STAT_PEND_OK;
if (OSLockNesting < 255u) { (11)
OSLockNesting++;
}
OS_EXIT_CRITICAL(); (12)
OS_Dummy(); (13)
OS_ENTER_CRITICAL();
if (OSLockNesting > 0u) { (14)
OSLockNesting--;
}
OSTaskDelHook(ptcb); (15)
#if OS_TASK_CREATE_EXT_EN > 0u
#if defined(OS_TLS_TBL_SIZE) && (OS_TLS_TBL_SIZE > 0u)
OS_TLS_TaskDel(ptcb);
#endif
#endif
OSTaskCtr--; (16)
OSTCBPrioTbl[prio] = (OS_TCB *)0; (17)
if (ptcb->OSTCBPrev == (OS_TCB *)0) { (18)
ptcb->OSTCBNext->OSTCBPrev = (OS_TCB *)0;
OSTCBList = ptcb->OSTCBNext;
} else {
ptcb->OSTCBPrev->OSTCBNext = ptcb->OSTCBNext;
ptcb->OSTCBNext->OSTCBPrev = ptcb->OSTCBPrev;
}
ptcb->OSTCBNext = OSTCBFreeList; (19)
OSTCBFreeList = ptcb;
#if OS_TASK_NAME_EN > 0u
ptcb->OSTCBTaskName = (INT8U *)(void *)"?";
#endif
OS_EXIT_CRITICAL();
if (OSRunning == OS_TRUE) {
OS_Sched(); (20)
}
return (OS_ERR_NONE);
}
(1) OSTaskDel() starts off by making sure you are not attempting to delete a task from within an ISR because that’s not allowed.
(2) OSTaskDel() checks that you are not attempting to delete the idle task because this is also not allowed.
(3) You are allowed to delete the statistic task (OS_LOWEST_PRIO-1) and all higher priority tasks (i.e. the task priority has a lower number).
(4) The caller can delete itself by specifying OS_PRIO_SELF as the argument.
(5) OSTaskDel() verifies that the task to delete does in fact exist . This test obviously will pass if you specified OS_PRIO_SELF. I didn’t want to create a separate case for this situation because it would have increased code size and thus execution time. If OS_PRIO_SELF is specified, we simply obtain the priority of the current task which is stored in its OS_TCB.
Once all conditions are satisfied, the OS_TCB is removed from all possible µC/OS-II data structures. OSTaskDel() does this in two parts to reduce interrupt latency.
(6) First, if the task is in the ready list, it is removed.
(7) If the task is in a list waiting for a mutex, mailbox, queue, or semaphore, it is removed from that list.
(8) If the task is in a list waiting for an event flag, it is removed from that list.
(9) Next, OSTaskDel() forces the delay count to zero to make sure that the tick ISR will not ready this task once you re-enable interrupts.
(10) OSTaskDel() sets the task’s .OSTCBStat flag to OS_STAT_RDY. Note that OSTaskDel() is not trying to make the task ready, it is simply preventing another task or an ISR from resuming this task [i.e., in case the other task or ISR calls OSTaskResume()]. This situation could occur because OSTaskDel() will be re-enabling interrupts (see L4.10(12)), so an ISR can make a higher priority task ready, which could resume the task you are trying to delete. Instead of setting the task’s .OSTCBStat flag to OS_STAT_RDY, I simply could have cleared the OS_STAT_SUSPEND bit (which would have been clearer), but this takes slightly more processing time.
(11) At this point, the task to delete cannot be made ready to run by another task or an ISR because it’s been removed from the ready list, it’s not waiting for an event to occur, it’s not waiting for time to expire, and it cannot be resumed. For all intents and purposes, the task is DORMANT. Because of this, OSTaskDel() must prevent the scheduler from switching to another task because if the current task is almost deleted, it could not be rescheduled!
(12) At this point, OSTaskDel() re-enables interrupts in order to reduce interrupt latency. OSTaskDel() could thus service an interrupt, but because it incremented OSLockNesting, the ISR would return to the interrupted task. Note that OSTaskDel() is still not done with the deletion process because it needs to unlink the OS_TCB from the TCB chain and return the OS_TCB to the free OS_TCB list.
(13) Note also that I call the dummy function OS_Dummy() immediately after calling OS_EXIT_CRITICAL(). I do this because I want to make sure that the processor executes at least one instruction with interrupts enabled. On many processors, executing an interrupt enable instruction forces the CPU to have interrupts disabled until the end of the next instruction! The Intel 80x86 and Zilog Z-80 processors actually work like this. Enabling and immediately disabling interrupts would behave just as if I didn’t enable interrupts. This would of course increase interrupt latency. Calling OS_Dummy() thus ensures that I execute a call and a return instruction before re-disabling interrupts. You could certainly replace OS_Dummy() with a macro that executes a “no-operation” instruction and thus slightly reduce the execution time of OSTaskDel(). I didn’t think it was worth the effort of creating yet another macro that would require porting.
(14) OSTaskDel() can now continue with the deletion process of the task. After OSTaskDel() re-disables interrupts, OSTaskDel() re-enables scheduling by decrementing the lock nesting counter.
(15) OSTaskDel() then calls the user-definable task delete hook OSTaskDelHook(). This allows user-defined OS_TCB extensions to be relinquished.
(16) Next, OSTaskDel() decrements the task counter to indicate that there is one less task being managed by µC/OS-II.
(17) OSTaskDel() removes the OS_TCB from the priority table by simply replacing the link to the OS_TCB of the task being deleted with a NULL pointer.
(18) OSTaskDel() then removes the OS_TCB of the task being deleted from the doubly linked list of OS_TCBs that starts at OSTCBList. Note that there is no need to check for the case where ptcb->OSTCBNext == 0 because OSTaskDel() cannot delete the idle task, which always happens to be at the end of the chain.
(19) The OS_TCB is returned to the free list of OS_TCBs to allow another task to be created.
(20) Last, but not least, the scheduler is called to see if a higher priority task has been made ready to run by an ISR that would have occurred when OSTaskDel() re-enabled interrupts at step [L4.11(12)].
Requesting to Delete a Task, OSTaskDelReq()
Sometimes, a task owns resources such as memory buffers or a semaphore. If another task attempts to delete this task, the resources are not freed and thus are lost. This would lead to memory leaks which is not acceptable for just about any embedded system. In this type of situation, you somehow need to tell the task that owns these resources to delete itself when it’s done with the resources. You can accomplish this with the OSTaskDelReq() function. Both the requestor and the task to be deleted need to call OSTaskDelReq(). The requestor code is shown in Listing 4.11.
void RequestorTask (void *pdata)
{
INT8U err;
pdata = pdata;
for (;;) {
/* Application code */
if ('TaskToBeDeleted()' needs to be deleted) { (1)
while (OSTaskDelReq(TASK_TO_DEL_PRIO) != OS_TASK_NOT_EXIST) { (2)
OSTimeDly(1); (3)
}
}
/* Application code */ (4)
}
}
(1) The task that makes the request needs to determine what conditions would cause a request for the task to be deleted. In other words, your application determines what conditions lead to this decision.
(2) If the task needs to be deleted, call OSTaskDelReq() by passing the priority of the task to be deleted. If the task to delete does not exist, OSTaskDelReq() returns OS_TASK_NOT_EXIST. You would get this if the task to delete has already been deleted or has not been created yet. If the return value is OS_NO_ERR, the request has been accepted but the task has not been deleted yet. You may want to wait until the task to be deleted does in fact delete itself.
(3) You can do this by delaying the requestor for a certain amount of time, as I did in. I decided to delay for one tick, but you can certainly wait longer if needed.
(4) When the requested task eventually deletes itself, the return value in L4.11(2) is OS_TASK_NOT_EXIST and the loop exits.
The pseudocode for the task that needs to delete itself is shown in Listing 4.12. This task basically polls a flag that resides inside the task’s OS_TCB. The value of this flag is obtained by calling OSTaskDelReq(OS_PRIO_SELF).
void TaskToBeDeleted (void *pdata)
{
INT8U err;
pdata = pdata;
for (;;) {
/* Application code */
if (OSTaskDelReq(OS_PRIO_SELF) == OS_TASK_DEL_REQ) { (1)
Release any owned resources; (2)
De-allocate any dynamic memory;
OSTaskDel(OS_PRIO_SELF); (3)
} else {
/* Application code */
}
}
}
(1) When OSTaskDelReq() returns OS_TASK_DEL_REQ to its caller, it indicates that another task has requested that this task needs to be deleted.
(2) & (3) In this case, the task to be deleted releases any resources owned and calls OSTaskDel(OS_PRIO_SELF) to delete itself. As previously mentioned, the code for the task is not actually deleted. Instead, µC/OS-II simply does not schedule the task for execution. In other words, the task code will no longer run. You can, however, recreate the task by calling either OSTaskCreate() or OSTaskCreateExt().
The code for OSTaskDelReq() is shown in Listing 4.13. As usual, OSTaskDelReq() needs to check for boundary conditions.
INT8U OSTaskDelReq (INT8U prio)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
BOOLEAN stat;
INT8U err;
OS_TCB *ptcb;
if (prio == OS_IDLE_PRIO) { (1)
return (OS_ERR_TASK_DEL_IDLE);
}
#if OS_ARG_CHK_EN > 0
if (prio >= OS_LOWEST_PRIO && prio != OS_PRIO_SELF) { (2)
return (OS_ERR_PRIO_INVALID);
}
#endif
if (prio == OS_PRIO_SELF) { (3)
OS_ENTER_CRITICAL();
stat = OSTCBCur->OSTCBDelReq;
OS_EXIT_CRITICAL();
return (stat);
}
OS_ENTER_CRITICAL();
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { (4)
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_EXIST); (6)
}
if (ptcb == OS_TCB_RESERVED) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_DEL);
}
ptcb->OSTCBDelReq = OS_ERR_TASK_DEL_REQ; (5)
OS_EXIT_CRITICAL();
return (OS_ERR_NONE);
}
(1) First, OSTaskDelReq() notifies the caller in case he requests to delete the idle task.
(2) Next, it must ensure that the caller is not trying to request to delete an invalid priority.
(3) If the caller is the task to be deleted, the flag stored in the OS_TCB is returned.
(4) & (5) If you specified a task with a priority other than OS_PRIO_SELF and the task exists, OSTaskDelReq() sets the internal flag for that task.
(6) If the task does not exist, OSTaskDelReq() returns OS_TASK_NOT_EXIST to indicate that the task must have deleted itself.
Changing a Task’s Priority, OSTaskChangePrio()
When you create a task, you assign the task a priority. At run time, you can change the priority of any task by calling OSTaskChangePrio(). In other words, µC/OS-II allows you to change priorities dynamically. The code for OSTaskChangePrio() is shown in Listing 4.14.
INT8U OSTaskChangePrio (INT8U oldprio, INT8U newprio)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
#if OS_EVENT_EN > 0
OS_EVENT *pevent;
#endif
OS_TCB *ptcb;
INT8U x;
INT8U y;
INT8U bitx;
INT8U bity;
#if OS_ARG_CHK_EN > 0u
if (oldprio >= OS_LOWEST_PRIO) { (1)
if (oldprio != OS_PRIO_SELF) {
return (OS_ERR_PRIO_INVALID);
}
}
if (newprio >= OS_LOWEST_PRIO) {
return (OS_ERR_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
if (OSTCBPrioTbl[newprio] != (OS_TCB *)0) { (2)
OS_EXIT_CRITICAL();
return (OS_ERR_PRIO_EXIST);
}
if (oldprio == OS_PRIO_SELF) {
oldprio = OSTCBCur->OSTCBPrio;
}
ptcb = OSTCBPrioTbl[oldprio]; (3)
if (ptcb == (OS_TCB *)0) {
OS_EXIT_CRITICAL();
return (OS_ERR_PRIO);
}
if (ptcb == OS_TCB_RESERVED) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_EXIST);
}
#if OS_LOWEST_PRIO <= 63u
y_new = (INT8U)(newprio >> 3u); (4)
x_new = (INT8U)(newprio & 0x07u);
#else
y_new = (INT8U)((INT8U)(newprio >> 4u) & 0x0Fu);
x_new = (INT8U)(newprio & 0x0Fu);
#endif
bity_new = (OS_PRIO)(1uL << y_new);
bitx_new = (OS_PRIO)(1uL << x_new);
OSTCBPrioTbl[oldprio] = (OS_TCB *)0;
OSTCBPrioTbl[newprio] = ptcb;
y_old = ptcb->OSTCBY;
bity_old = ptcb->OSTCBBitY;
bitx_old = ptcb->OSTCBBitX;
if ((OSRdyTbl[y_old] & bitx_old) != 0u) { (5)
OSRdyTbl[y_old] &= (OS_PRIO)~bitx_old;
if (OSRdyTbl[y_old] == 0u) {
OSRdyGrp &= (OS_PRIO)~bity_old;
}
OSRdyGrp |= bity_new;
OSRdyTbl[y_new] |= bitx_new;
}
#if (OS_EVENT_EN)
pevent = ptcb->OSTCBEventPtr; (6)
if (pevent != (OS_EVENT *)0) {
pevent->OSEventTbl[y_old] &= (OS_PRIO)~bitx_old;
if (pevent->OSEventTbl[y_old] == 0u) {
pevent->OSEventGrp &= (OS_PRIO)~bity_old;
}
pevent->OSEventGrp |= bity_new;
pevent->OSEventTbl[y_new] |= bitx_new;
}
#if (OS_EVENT_MULTI_EN > 0u)
if (ptcb->OSTCBEventMultiPtr != (OS_EVENT **)0) {
pevents = ptcb->OSTCBEventMultiPtr;
pevent = *pevents;
while (pevent != (OS_EVENT *)0) {
pevent->OSEventTbl[y_old] &= (OS_PRIO)~bitx_old;
if (pevent->OSEventTbl[y_old] == 0u) {
pevent->OSEventGrp &= (OS_PRIO)~bity_old;
}
pevent->OSEventGrp |= bity_new;
pevent->OSEventTbl[y_new] |= bitx_new;
pevents++;
pevent = *pevents;
}
}
#endif
#endif
ptcb->OSTCBPrio = newprio; (7)
ptcb->OSTCBY = y_new;
ptcb->OSTCBX = x_new;
ptcb->OSTCBBitY = bity_new;
ptcb->OSTCBBitX = bitx_new;
OS_EXIT_CRITICAL();
if (OSRunning == OS_TRUE) {
OS_Sched();
}
return (OS_ERR_NONE);
}
(1) You cannot change the priority of the idle task. You can change either the priority of the calling task or another task. To change the priority of the calling task, either specify the old priority of that task or specify OS_PRIO_SELF, and OSTaskChangePrio() will determine what the priority of the calling task is for you. You must also specify the new (i.e., desired) priority.
(2) Because µC/OS-II cannot have multiple tasks running at the same priority, OSTaskChangePrio() needs to check that the new desired priority is available.
(3) Here we are making sure that the priority we are changing does indeed exist.
(4) OSTaskChangePrio() precomputes some values that are stored in the task’s OS_TCB. These values are used to put or remove the task in or from the ready list (see section 3.04, Ready List).
(5) If the task that we are changing for is ready to run then we need to remove the task from the ready list at the current priority and insert it in the ready list at the new priority.
(6) If the task is not ready, it could be waiting on a semaphore, mailbox, or queue. OSTaskChangePrio() knows that the task is waiting for one of these events if the OSTCBEventPtr is non-NULL. If the task is waiting for an event, OSTaskChangePrio() must remove the task from the wait list (at the old priority) of the event control block (see Chapter 6, Event Control Blocks) and insert the task back into the wait list, but this time at the new priority. The task could be waiting for time to expire (see Chapter 5, Time Management) or the task could be suspended [see section 4.07, Suspending a Task, OSTaskSuspend()].
(7) Pre-computed are then saved in the task's TCB.
After OSTaskChangePrio() exits the critical section, the scheduler is called in case the new priority is higher than the old priority or the priority of the calling task.
Suspending a Task, OSTaskSuspend()
Sometimes it is useful to explicitly suspend the execution of a task. This is accomplished with the OSTaskSuspend() function call. A suspended task can only be resumed by calling the OSTaskResume() function call. Task suspension is additive. This means that if the task being suspended is also waiting for time to expire, the suspension needs to be removed and the time needs to expire in order for the task to be ready to run. A task can suspend either itself or another task.
The code for OSTaskSuspend() is shown in Listing 4.15.
INT8U OSTaskSuspend (INT8U prio)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
BOOLEAN self;
OS_TCB *ptcb;
#if OS_ARG_CHK_EN > 0
if (prio == OS_IDLE_PRIO) { (1)
return (OS_ERR_TASK_SUSPEND_IDLE);
}
if (prio >= OS_LOWEST_PRIO && prio != OS_PRIO_SELF) { (2)
return (OS_ERR_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
if (prio == OS_PRIO_SELF) { (3)
prio = OSTCBCur->OSTCBPrio;
self = OS_TRUE;
} else if (prio == OSTCBCur->OSTCBPrio) { (4)
self = OS_TRUE;
} else {
self = OS_FALSE;
}
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { (5)
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_SUSPEND_PRIO);
}
OSRdyTbl[y] &= (OS_PRIO)~ptcb->OSTCBBitX; (6)
if (OSRdyTbl[y] == 0u) {
OSRdyGrp &= (OS_PRIO)~ptcb->OSTCBBitY;
}
ptcb->OSTCBStat |= OS_STAT_SUSPEND; (7)
OS_EXIT_CRITICAL();
if (self == OS_TRUE) {
OS_Sched(); (8)
}
return (OS_ERR_NONE);
}
(1) OSTaskSuspend() ensures that your application is not attempting to suspend the idle task.
(2) Next, you must specify a valid priority. Remember that the highest valid priority number (i.e., lowest priority) is OS_LOWEST_PRIO. Note that you can suspend the statistic task. You may have noticed that the first test [L4.15(1)] is replicated in [L4.15(2)]. I did this to be backward compatible with µC/OS. The first test could be removed to save a little bit of processing time, but this is really insignificant so I decided to leave it.
(3) Next, OSTaskSuspend() checks to see if you specified to suspend the calling task by specifying OS_PRIO_SELF. In this case, the current task’s priority is retrieved from its OS_TCB.
(4) You could also decided to suspend the calling task by specifying its priority. In both of these cases, the scheduler needs to be called. This is why I created the local variable self, which will be examined at the appropriate time. If you are not suspending the calling task, then OSTaskSuspend() does not need to run the scheduler because the calling task is suspending a lower priority task.
(5) OSTaskSuspend() then checks to see that the task to suspend exists.
(6) If so, it is removed from the ready list. Note that the task to suspend may not be in the ready list because it could be waiting for an event or for time to expire. In this case, the corresponding bit for the task to suspend in OSRdyTbl[] would already be cleared (i.e., 0). Clearing it again is faster than checking to see if it’s clear and then clearing it if it’s not.
(7) Now OSTaskSuspend() sets the OS_STAT_SUSPEND flag in the task’s OS_TCB to indicate that the task is now suspended.
(8) Finally, OSTaskSuspend() calls the scheduler only if the task being suspended is the calling task.
Resuming a Task, OSTaskResume()
As mentioned in the previous section, a suspended task can only be resumed by calling OSTaskResume(). The code for OSTaskResume() is shown in Listing 4.16.
INT8U OSTaskResume (INT8U prio)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
OS_TCB *ptcb;
#if OS_ARG_CHK_EN > 0
if (prio >= OS_LOWEST_PRIO) { (1)
return (OS_ERR_PRIO_INVALID);
}
#endif
OS_ENTER_CRITICAL();
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { (2)
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_RESUME_PRIO);
}
if ((ptcb->OSTCBStat & OS_STAT_SUSPEND) != OS_STAT_RDY) { (3)
ptcb->OSTCBStat &= (INT8U)~(INT8U)OS_STAT_SUSPEND;
if ((ptcb->OSTCBStat & OS_STAT_PEND_ANY) == OS_STAT_RDY) { (4)
if (ptcb->OSTCBDly == 0u) { (5)
OSRdyGrp |= ptcb->OSTCBBitY; (6)
OSRdyTbl[ptcb->OSTCBY] |= ptcb->OSTCBBitX;
OS_EXIT_CRITICAL();
if (OSRunning == OS_TRUE) {
OS_Sched(); (7)
}
} else {
OS_EXIT_CRITICAL();
} else {
OS_EXIT_CRITICAL();
}
return (OS_ERR_NONE);
}
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_SUSPENDED);
}
(1) Because OSTaskSuspend() cannot suspend the idle task, it must verify that your application is not attempting to resume this task. Note that this test also ensures that you are not trying to resume OS_PRIO_SELF (OS_PRIO_SELF is #defined to 0xFF, which is always greater than OS_LOWEST_PRIO), which wouldn’t make sense – you can’t resume self because self cannot possibly be suspended.
(2) & (3) The task to resume must exist because you will be manipulating its OS_TCB , and it must also have been suspended.
(4) OSTaskResume() removes the suspension by clearing the OS_STAT_SUSPEND bit in the .OSTCBStat field.
(5) For the task to be ready to run, the .OSTCBDly field must be 0 because there are no flags in OSTCBStat to indicate that a task is waiting for time to expire.
(6) The task is made ready to run only when both conditions are satisfied.
(7) Finally, the scheduler is called to see if the resumed task has a higher priority than the calling task.
Getting Information about a Task, OSTaskQuery()
Your application can obtain information about itself or other application tasks by calling OSTaskQuery(). In fact, OSTaskQuery() obtains a copy of the contents of the desired task’s OS_TCB. The fields available to you in the OS_TCB depend on the configuration of your application (see OS_CFG.H). Indeed, because µC/OS-II is scalable, it only includes the features that your application requires.
To call OSTaskQuery(), your application must allocate storage for an OS_TCB, as shown in Listing 4.17. This OS_TCB is in a totally different data space from the OS_TCBs allocated by µC/OS-II. After calling OSTaskQuery(), this OS_TCB contains a snapshot of the OS_TCB for the desired task. You need to be careful with the links to other OS_TCBs (i.e., .OSTCBNext and .OSTCBPrev); you don’t want to change what these links are pointing to! In general, only use this function to see what a task is doing — a great tool for debugging.
void MyTask (void *pdata)
{
OS_TCB MyTaskData;
pdata = pdata;
for (;;) {
/* User code */
err = OSTaskQuery(10, &MyTaskData);
/* Examine error code .. */
/* User code */
}
}
The code for OSTaskQuery() is shown in Listing 4.18.
INT8U OSTaskQuery (INT8U prio, OS_TCB *pdata)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
OS_TCB *ptcb;
#if OS_ARG_CHK_EN > 0u
if (prio > OS_LOWEST_PRIO) { (1)
if (prio != OS_PRIO_SELF) {
return (OS_ERR_PRIO_INVALID);
}
}
if (p_task_data == (OS_TCB *)0) {
return (OS_ERR_PDATA_NULL);
}
#endif
OS_ENTER_CRITICAL();
if (prio == OS_PRIO_SELF) { (2)
prio = OSTCBCur->OSTCBPrio;
}
ptcb = OSTCBPrioTbl[prio];
if (ptcb == (OS_TCB *)0) { (3)
OS_EXIT_CRITICAL();
return (OS_ERR_PRIO);
}
if (ptcb == OS_TCB_RESERVED) {
OS_EXIT_CRITICAL();
return (OS_ERR_TASK_NOT_EXIST);
}
OS_MemCopy((INT8U *)p_task_data, (INT8U *)ptcb, sizeof(OS_TCB)); (4)
OS_EXIT_CRITICAL();
return (OS_ERR_NONE);
}
(1) Note that I allow you to examine ALL the tasks, including the idle task. You need to be especially careful not to change what .OSTCBNext and .OSTCBPrev are pointing to.
(2) & (3) As usual, OSTaskQuery() checks to see if you want information about the current task and that the task has been created.
(4) All fields are copied using the assignment shown instead of field by field.